




产品列表



联系我们
锋速达通风降温系统
电 话:0573-83418060>
传 真:0573-83418060
联系人
售前咨询:15068216608
技术指导:18858318765
售后服务:15821073963
地 址:浙江省嘉兴市南湖区
负压风机厂电动机软启动器实用技术柴油发电机组数字调速工程的设
中国风机信息网编纂,图手札息 电念头软启动器实用技术[1] 作 者: 刘利,王栋 主编出 版 社: 中国电力出书社出书时间: 2010-1-1开 本: 16开I S B N : 9787508390321定价:¥30.00内容简介 本书内容工程、各个方面,反映了最新技术,重视理论与典型使用实例相连系。本书适合于从事电力电子技术、自动控制、电气自动化等领域的专业技术人员和各工矿企业的工程技术人员阅读,也可作为高等黉舍自动化类相关专业的参考教材。目录 前言第1章 交流异步电念头软启动器根蒂根基1.1 引言1.2 交流异步电念头的直接启动1.3 交流异步电念头启动装配的分类1.4 交流异步电念头各类启动装配的特征1.5 电念头启动装配的综合评价1.6 交流异步电念头各类启动方式的比力1.7 交流异步电念头软启动技术的成长1.8 交流异步电念头软启动器的相关尺度第2章 交流异步电念头软启动器原理2.1 交流异步电念头的启动特征2.2 晶闸管交流调压电路分析2.3 软启动器的基来源根基理2.4 电念头在软启动时的机械特征2.5 软启动器的工程组成第3章 交流异步电念头软启动器主电路结构3.l 谐波的影响3.2 软启动器主电路的设计原则3.3 低压软启动器(1100V以下)电路结构3.4 中高压软启动器(6000V及以上)电路结构3.5 晶闸管的选择与使用第4章 交流异步电念头软启动器的控制方式4.1 电压斜坡控制方式4.2 电压突跳控制方式4中国风机信息网编纂.3 电流限幅控制方式4.4 电流斜坡控制方式4.5 具有限流功能的电压斜坡控制方式4.6 转速闭环控制方式4.7 转矩控制方式4.8 智能控制4.9 分级变频控制方式4.10 停车控制方式4.11 运作控制方式第5章 软启动器的功能5.1 工作方式的选择和相关参数5.2 软启动器的外接控制功能5.3 软启动器的外接输出功能5.4 软启动器的监视和控制功能5.5 键盘设置装备摆设和参数设置5.6 软启动器的通讯功能第6章 软启动工程的庇护6.1 简介6.2 对软启动器的庇护6.3 对电路的庇护6.4 对电念头的庇护6.5 软启动器的计较机综合庇护6.6 庇护的协调配合6.7 软启动器故障庇护的处置第7章 软启动器使用根蒂根基7.1 软启动器的电气数据7.2 软启动器的工作情况条件7.3 生产机械负载种类和工作制7.4 软启动器的选用7.5 软启动器的基本设置7.6 软启动器的安装与接地7.7 软启动器的温升和冷却7.8 软启动器的调试和测试7.9 装备的维护7.10 标志、包装、运输、存储7.11 三相感应电念头软启动的仿真第8章 典型使用电路8.1 基本电路8.2 软启动器与多电念头主电路方案8.3 多速电念头软启动电路8.4 正反转控制电路8.5 内三角联络电路第9章 外围装备及备件的选用9.1 自动空气断路器9.2 隔脱离关9.3 进线电抗器9.4 交流接触器9.5 熔断器9.6 热继电器9.7 热敏电阻(PTC)第10章 常见问题10.1 直接启动和软启动的选择10.2 节能功能的使用问题10.3 电念头软启动完成时间的计较10.4 电念头软启动阶段电压的波动率10.5 软启动器的容量和启动转矩10.6 软启动器的消耗和效率10.7 电磁兼容10.8 软启动器在绕线转子电念头上的使用问题10.9 功率因数的改良及抵偿装配的装设10.10 漏电流和空载输出电压10.11 操作面板的引出距离10.12 增强软启动工程工作靠得住性的要点第11章 故障诊断和维修11.1 上电故障11.2 启动阶段中的故障11.3 运作阶段中的故障11.4 停车阶段中的故障11.5 通讯故障11.6 晶闸管的故障诊断和维修11.7 断路器常见故障及处置11.8 异步电念头常见故障及处置第12章 典型使用典范榜样12.1 常见生产机械的特征及软启动参数设置12.2 电念头软启动器在风机上的使用12.3 电念头软启动器在水泵上的使用12.4 电念头软启动器在空气压缩机上的使用12.5 电念头软启动器在带式输送机上的使用12.6 其他机械的控制12.7 小容量电网下电念头的软启动参考文献
在PID控制中,比例项用于纠正误差,积分项用于消除工程的稳态误差,微分项用于减小工程的超调量,增加工程稳定性。PID控制器的性能就决议于Kp、T1和TD这3个系数。若何选用这3个系数是PID控制的焦点。
1.2 数字PID控制算法选择
设计和调整数字PID控制器的使命就是凭据被控对象和工程要求,选择合适的PID模子,将其进行离散化处置,编出计较机法式由微处置器实现,最后肯定KP、T1、TD、和T,T为采样周期。微处置器控制是一种采样控制,它只能凭据采样时刻的误差值计较控制量,是以,必需对PID模子进行离散化处置。
用矩形方式数值积分取代式(3)中的积分项,对式(3)中的导数项用后向差分迫近,经推理可获得基本PID控制的位置式算法:式中 k——采样序号,k=0,1,2,……
U(k)——第k次采样时刻输出值
E(k)——第k次采样时输进的误差值
E(k-1)——第(k-1)次采样时刻输进的误差值
K1——积分系数,K1=KpT/T1
KD——微分数系,KD=KpTD/T1
在数字控制工程中,PID控制纪律是用法式来实现的,因而具有更年夜的灵活性。由于基本PID控制中引进了积分环节,其目的主要是为了消除静差,提高精度。但在柴油机调速进程中,突加突减负载时,会引发转速的较年夜波动,致使短时间内转速泛起较年夜误差,经由过程PID积分运算堆集,超调量过年夜,工程发生振荡,严重影响发机电组输出电能的品质。
为避免PID控制中积分项引发的超调,提高其调理品质,拟采用积分分手法对基本PID控制进行改良,简称变速积分PID。变速积分PID的基本思绪是想法改变积分项的累加速度,使其与误差年夜小相对应,误差越年夜,积分越慢;反之,则越快。式中,A、B为积分区间。
变速积分PID算法为:式中,U1(k)为第k次采样时刻PID运算的积分部门输出值。
采用变速积分PID控制,工程具有以下特点:用比例消除年夜误差,用积分消除小误差,可完全消除积分饱和现象;各参数容易整定,易实现工程稳定,而且对A、B两参数不要求十分切确;超调量年夜年夜减小,改善了调理品质,顺应性较强。变速积分PID控制算法流程图见图2。
数字PID控制参数整定的使命主要是肯定数字PID的参数KP、T1、TD和T。
对于简单控制工程,可采用理论计较方式肯定这些参数。但由于柴油机调速工程的工况较为复杂,其数学模子并非十分切确,在此,采用工程整定经常使用的扩充临界比例带法,连系经验法再对参数进行调整,获得最终的PID参数。
(1)采样周期T的选择
在数字控制工程中,采样周期T是一个比力重要的身分,采样周期的拔取,应与PID参数的整定综合斟酌。
首先,采样周期T的拔取应知足以下要求:远小于对象扰动周期;比对象时间常数小得多;尽量缩短采样周期,以改善调理品质。
该工程中,PID调理控制进程是在按时中断状态下完成的,是以,采样周期T的年夜小必需保证中断服务法式的正常运行。在不影响中断法式运行的情况下,可取采样周期T=0.1τ(τ为柴油机的纯滞后时间)。傍边断法式运行时间Tz年夜于0.1τ时,则取T=Tz,采样周期可按下式肯定:(2)临界振荡周期Ts简直定
初始肯定数字PID参数时,在用上述方式肯定采样周期T的条件下,从调速工程的PID调理回路中,往失落数字控制器的微分控建造用和积分控建造用,只采用比例调理环节来肯定工程的振荡周期Ts和临界比例系数Ks。由单片机工程自动控制比例系数KP,并逐渐增年夜Kp,直到工程泛起延续的等幅振荡,然后由单片机工程自动记实并显示调速工程发生等幅振荡时的临界比例度δ和响应的临界振荡周期Ts。式中Ks——等幅振荡时的临界比例系数(3)控制度的选择
控制度就是以模拟调理器为根蒂根基,定量衡量数字控制工程与模拟调理器对统一对象的控制效果。控制效果就是采用某一积分准则,凭据工程在划定的输进下的输出响应,使用该准则取最小值时的最式中,下标DDC和ANA划分暗示直接数字控制和模拟调理器控制。
如前所述,采样周期T的长短会影响工程的控制品质,一样是最好整定,数字控制工程的品质要低于模拟工程的控制品质。即控制度总是年夜于1的,且控制度越年夜,响应的数字控制工程品质越差。
为获得与模拟控制器相当的品质,控制度选为1.05。分歧控制度时,扩充临界比例带法PID参数计较公式见表1。(4)KP、K1、KD、T的求取
凭据实验所得Ks和Ts及选定的控制度,按表1计较出数字PID参数Kp、T1、TD和T。
(5)控制效果的调理
按求得的参数值在调速控制工程中运行,并观察控制效果。如控制效果达不到控制要求,可基于以下原则,凭据经验法对参数做适当调整。
①增年夜比例系数Kp,将加速工程的响应速度,但过年夜会使工程发生较年夜超调,甚至发生振荡。
②增年夜积分时间T1,有益于减小超调,削减振荡,使工程加倍稳定,但会增加工程过渡进程时间。
③增年夜微分时间常数TD有益于加速工程的响应,使超调减小,稳定性增加,但工程对扰动的抑制能力削弱,对扰动有较敏感的响应。
基于上述原则,调整PID参数时,应先比例、后积分、再微分进行调整。
参考文献:
[1] 陶永华,尹怡欣,葛芦生.新型PID控制及其运用[M].机械工业出书社,1998.
[2] 王福瑞.单片微机测控工程设计年夜全[M].北京航空航天年夜学出书社,1998.
[3] 王胜洪.CU673C电子调速器性能、原理、使用及调整[J].移动电源与车辆,1995.
[4] 赵志强,韩秀坤,程昌圻.一种新的数字调速器的设计及实验[J].北京理工年夜学学报,1998.(
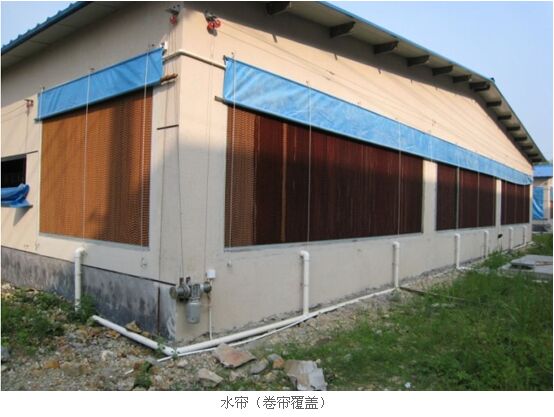
锋速达是水帘生产厂家|环保空调生产厂家|屋顶风机厂家|,锋速达承接规划:猪场降温|车间降温|厂房降温|猪场通风|车间通风|厂房通风|屋顶排风机|屋顶排热|厂房通风降温|车间通风降温|通风换气排热降温工程|屋顶风机安装|负压风机安装|水帘安装|环保空调安装|通风设备安装|通风降温设备|通风系统安装案例|通风降温系统|屋顶通风机|屋顶排风系统
相关的主题文章:

柴油发机电组数字调速工程研制进程中发现,采用普通PID运算,振荡及超调时有发生,为了改善调速工程性能,采用了变速积分PID及模糊PID。变速积分PID用来调理积分系数,模糊PID用来调理比例系数。
1 变速积分PID原理
1.1 PID控制原理[1,2]
常规PID控制工程原理框图如图1所示。
在PID控制中,比例项用于纠正误差,积分项用于消除工程的稳态误差,微分项用于减小工程的超调量,增加工程稳定性。PID控制器的性能就决议于Kp、T1和TD这3个系数。若何选用这3个系数是PID控制的焦点。
1.2 数字PID控制算法选择
设计和调整数字PID控制器的使命就是凭据被控对象和工程要求,选择合适的PID模子,将其进行离散化处置,编出计较机法式由微处置器实现,最后肯定KP、T1、TD、和T,T为采样周期。微处置器控制是一种采样控制,它只能凭据采样时刻的误差值计较控制量,是以,必需对PID模子进行离散化处置。
用矩形方式数值积分取代式(3)中的积分项,对式(3)中的导数项用后向差分迫近,经推理可获得基本PID控制的位置式算法:式中 k——采样序号,k=0,1,2,……
U(k)——第k次采样时刻输出值
E(k)——第k次采样时输进的误差值
E(k-1)——第(k-1)次采样时刻输进的误差值
K1——积分系数,K1=KpT/T1
KD——微分数系,KD=KpTD/T1
在数字控制工程中,PID控制纪律是用法式来实现的,因而具有更年夜的灵活性。由于基本PID控制中引进了积分环节,其目的主要是为了消除静差,提高精度。但在柴油机调速进程中,突加突减负载时,会引发转速的较年夜波动,致使短时间内转速泛起较年夜误差,经由过程PID积分运算堆集,超调量过年夜,工程发生振荡,严重影响发机电组输出电能的品质。
为避免PID控制中积分项引发的超调,提高其调理品质,拟采用积分分手法对基本PID控制进行改良,简称变速积分PID。变速积分PID的基本思绪是想法改变积分项的累加速度,使其与误差年夜小相对应,误差越年夜,积分越慢;反之,则越快。式中,A、B为积分区间。
变速积分PID算法为:式中,U1(k)为第k次采样时刻PID运算的积分部门输出值。
采用变速积分PID控制,工程具有以下特点:用比例消除年夜误差,用积分消除小误差,可完全消除积分饱和现象;各参数容易整定,易实现工程稳定,而且对A、B两参数不要求十分切确;超调量年夜年夜减小,改善了调理品质,顺应性较强。变速积分PID控制算法流程图见图2。
数字PID控制参数整定的使命主要是肯定数字PID的参数KP、T1、TD和T。
对于简单控制工程,可采用理论计较方式肯定这些参数。但由于柴油机调速工程的工况较为复杂,其数学模子并非十分切确,在此,采用工程整定经常使用的扩充临界比例带法,连系经验法再对参数进行调整,获得最终的PID参数。
(1)采样周期T的选择
在数字控制工程中,采样周期T是一个比力重要的身分,采样周期的拔取,应与PID参数的整定综合斟酌。
首先,采样周期T的拔取应知足以下要求:远小于对象扰动周期;比对象时间常数小得多;尽量缩短采样周期,以改善调理品质。
该工程中,PID调理控制进程是在按时中断状态下完成的,是以,采样周期T的年夜小必需保证中断服务法式的正常运行。在不影响中断法式运行的情况下,可取采样周期T=0.1τ(τ为柴油机的纯滞后时间)。傍边断法式运行时间Tz年夜于0.1τ时,则取T=Tz,采样周期可按下式肯定:(2)临界振荡周期Ts简直定
初始肯定数字PID参数时,在用上述方式肯定采样周期T的条件下,从调速工程的PID调理回路中,往失落数字控制器的微分控建造用和积分控建造用,只采用比例调理环节来肯定工程的振荡周期Ts和临界比例系数Ks。由单片机工程自动控制比例系数KP,并逐渐增年夜Kp,直到工程泛起延续的等幅振荡,然后由单片机工程自动记实并显示调速工程发生等幅振荡时的临界比例度δ和响应的临界振荡周期Ts。式中Ks——等幅振荡时的临界比例系数(3)控制度的选择
控制度就是以模拟调理器为根蒂根基,定量衡量数字控制工程与模拟调理器对统一对象的控制效果。控制效果就是采用某一积分准则,凭据工程在划定的输进下的输出响应,使用该准则取最小值时的最式中,下标DDC和ANA划分暗示直接数字控制和模拟调理器控制。
如前所述,采样周期T的长短会影响工程的控制品质,一样是最好整定,数字控制工程的品质要低于模拟工程的控制品质。即控制度总是年夜于1的,且控制度越年夜,响应的数字控制工程品质越差。
为获得与模拟控制器相当的品质,控制度选为1.05。分歧控制度时,扩充临界比例带法PID参数计较公式见表1。(4)KP、K1、KD、T的求取
凭据实验所得Ks和Ts及选定的控制度,按表1计较出数字PID参数Kp、T1、TD和T。
(5)控制效果的调理
按求得的参数值在调速控制工程中运行,并观察控制效果。如控制效果达不到控制要求,可基于以下原则,凭据经验法对参数做适当调整。
①增年夜比例系数Kp,将加速工程的响应速度,但过年夜会使工程发生较年夜超调,甚至发生振荡。
②增年夜积分时间T1,有益于减小超调,削减振荡,使工程加倍稳定,但会增加工程过渡进程时间。
③增年夜微分时间常数TD有益于加速工程的响应,使超调减小,稳定性增加,但工程对扰动的抑制能力削弱,对扰动有较敏感的响应。
基于上述原则,调整PID参数时,应先比例、后积分、再微分进行调整。
参考文献:
[1] 陶永华,尹怡欣,葛芦生.新型PID控制及其运用[M].机械工业出书社,1998.
[2] 王福瑞.单片微机测控工程设计年夜全[M].北京航空航天年夜学出书社,1998.
[3] 王胜洪.CU673C电子调速器性能、原理、使用及调整[J].移动电源与车辆,1995.
[4] 赵志强,韩秀坤,程昌圻.一种新的数字调速器的设计及实验[J].北京理工年夜学学报,1998.(
锋速达是水帘生产厂家|环保空调生产厂家|屋顶风机厂家|,锋速达承接规划:猪场降温|车间降温|厂房降温|猪场通风|车间通风|厂房通风|屋顶排风机|屋顶排热|厂房通风降温|车间通风降温|通风换气排热降温工程|屋顶风机安装|负压风机安装|水帘安装|环保空调安装|通风设备安装|通风降温设备|通风系统安装案例|通风降温系统|屋顶通风机|屋顶排风系统
相关的主题文章:
